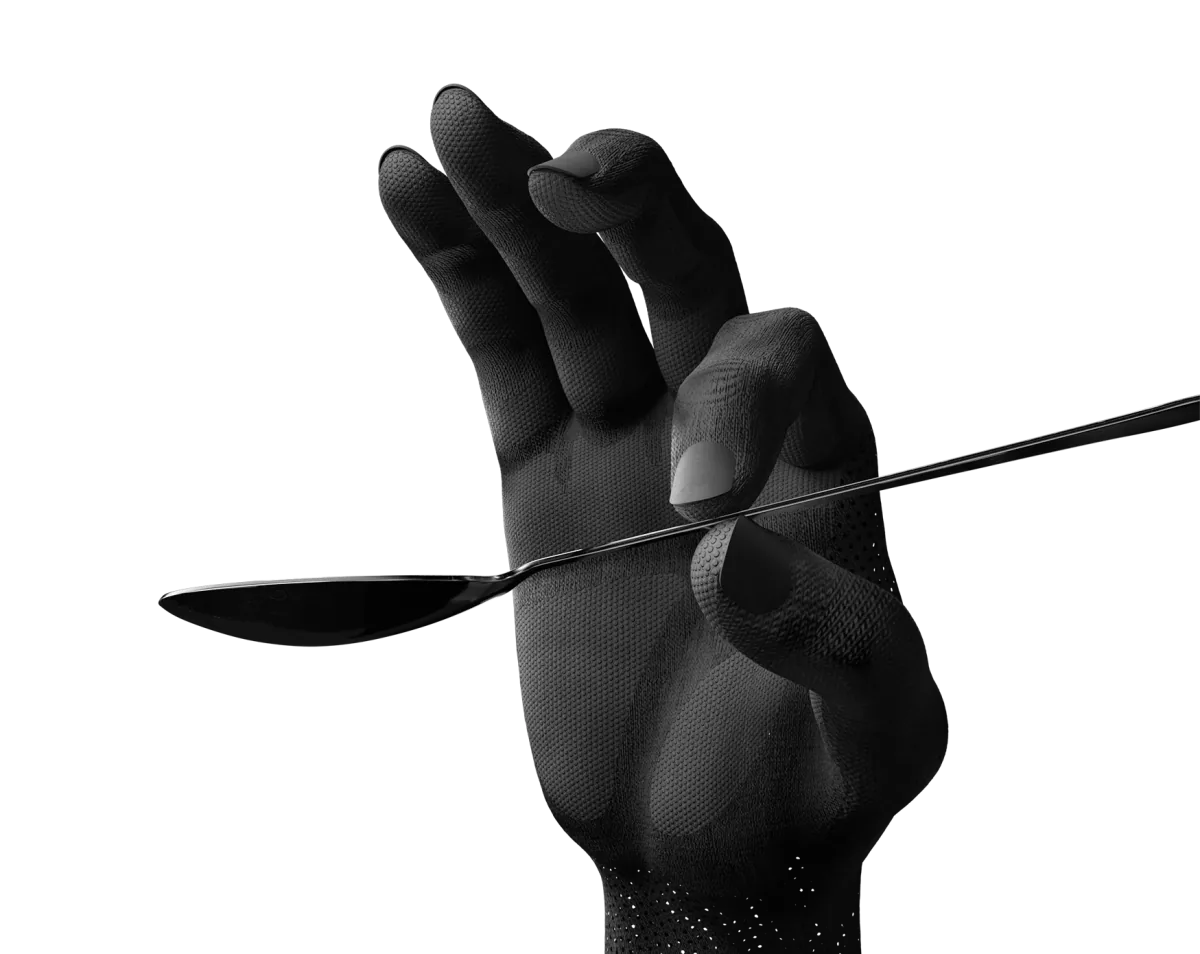
精密捏取


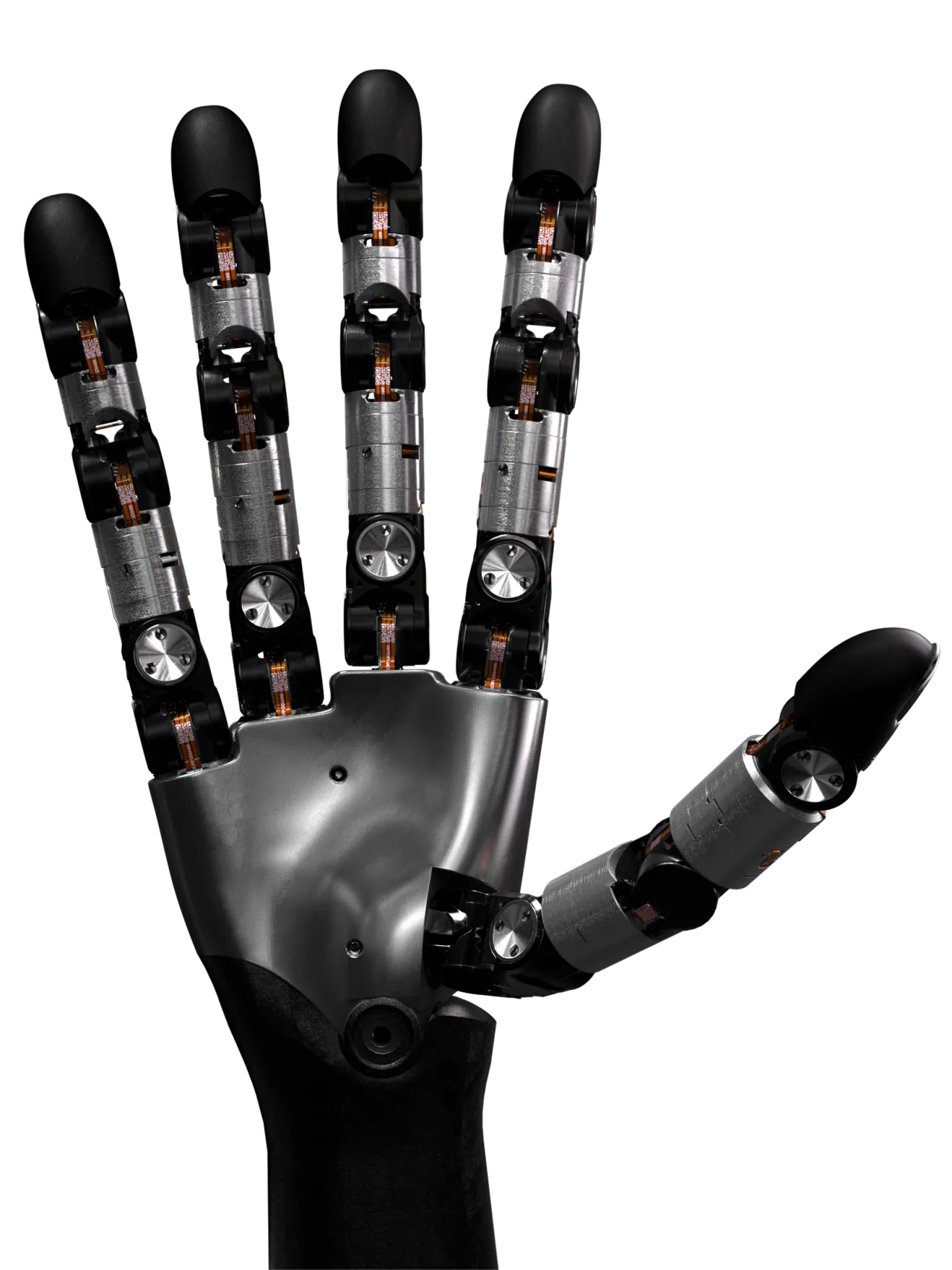
舞肌科技成立于 2019 年。从电机到灵巧手与数据采集,打造世界领先的通用操作解决方案。让机器人拥有人类般的灵巧,加速通用物理智能。
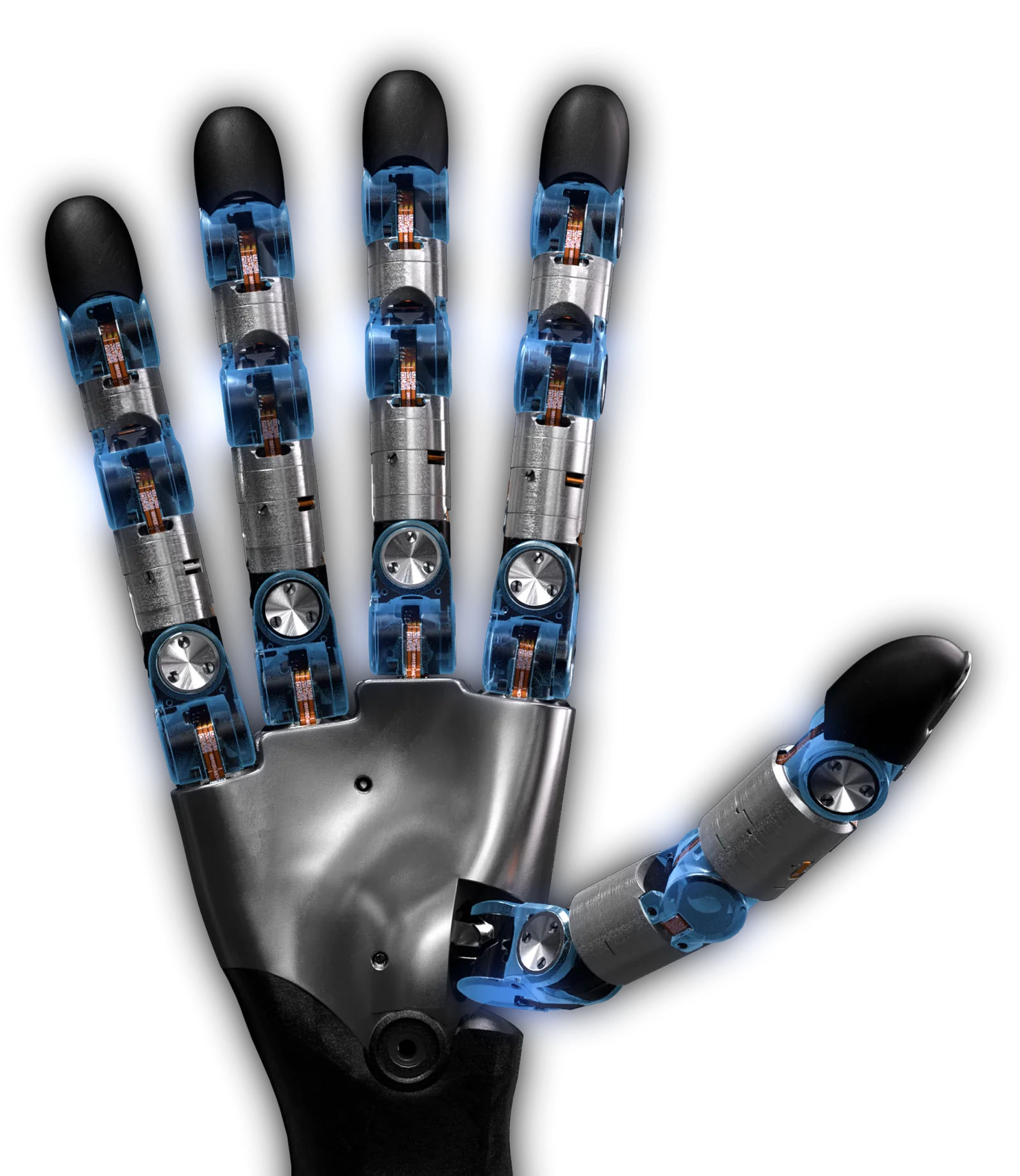





为长期稳定运行而生。每一处细节为降低维护成本、缩短故障恢复时间而设计,让您专注科研与创新。

统一设备接入与实时可视化,一站式开发调试

原生支持,无缝接入机器人系统
高精度仿真模型,支持 Sim-to-Real 训练

支持多种输入方式,包括 Wuji Glove、Apple Vision Pro、Intel RealSense



* 当前参数为 Beta1 阶段产品规格,SPEC 将持续迭代。最新参数请参见 Beta1 产品文档 。
